Introduction of WLKATA Mirobot
WLKATA Mirobot is a six-axis mini industrial robot arm manipulator and is independently developed and launched by Beijing Tsinew Technologies Co., Ltd. The WLKATA Mirobot manipulator is primarily developed for STEAM makers, and adolescent education and higher education purpose.
It represents a new generation of lightweight six-axis desktop robot arm model, which integrates a variety of practical functions, such as drawing, handling, stacking, painting, writing and machine vision. Users can easily control Mirobot by remote controller, graphical programming, teaching and play. It has a rich I / O extension interface, which allowed it to connect to diverse end-effectors. For advanced operation, users could adopt Python, C++ and more for subsequent development.
1. Structure of WLKATA Mirobot
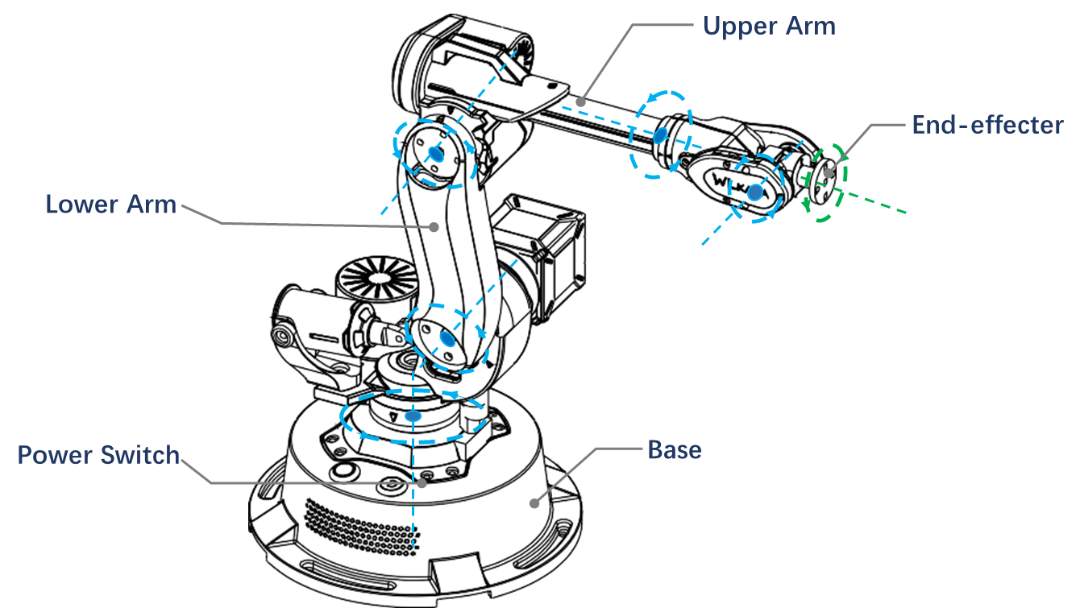
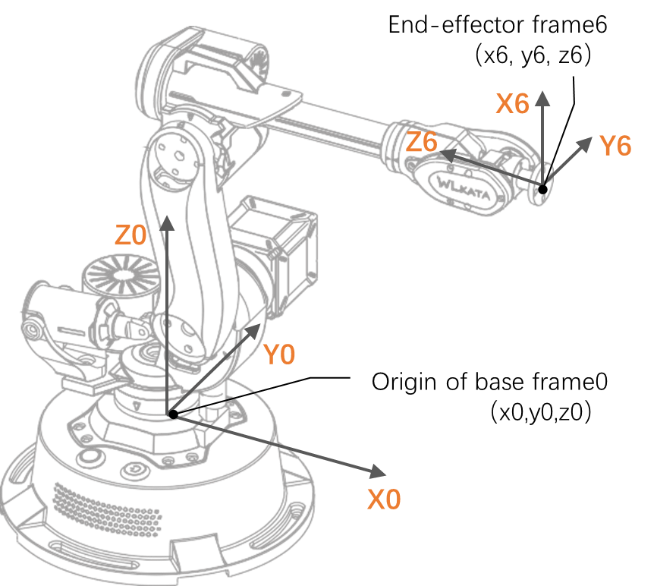
WLKATA Mirobot is mainly composed by a base, six rotating joints, a lower arm, an upper arm, an end-effector connection plate. There are a total of six robot joints in Mirobot. The reference frame is shown in Figure below. For more information of the structure of Mirobot, please refers to the section Working principle and specification in this manual.

2. Items in the WLKATA Mirobot standard set
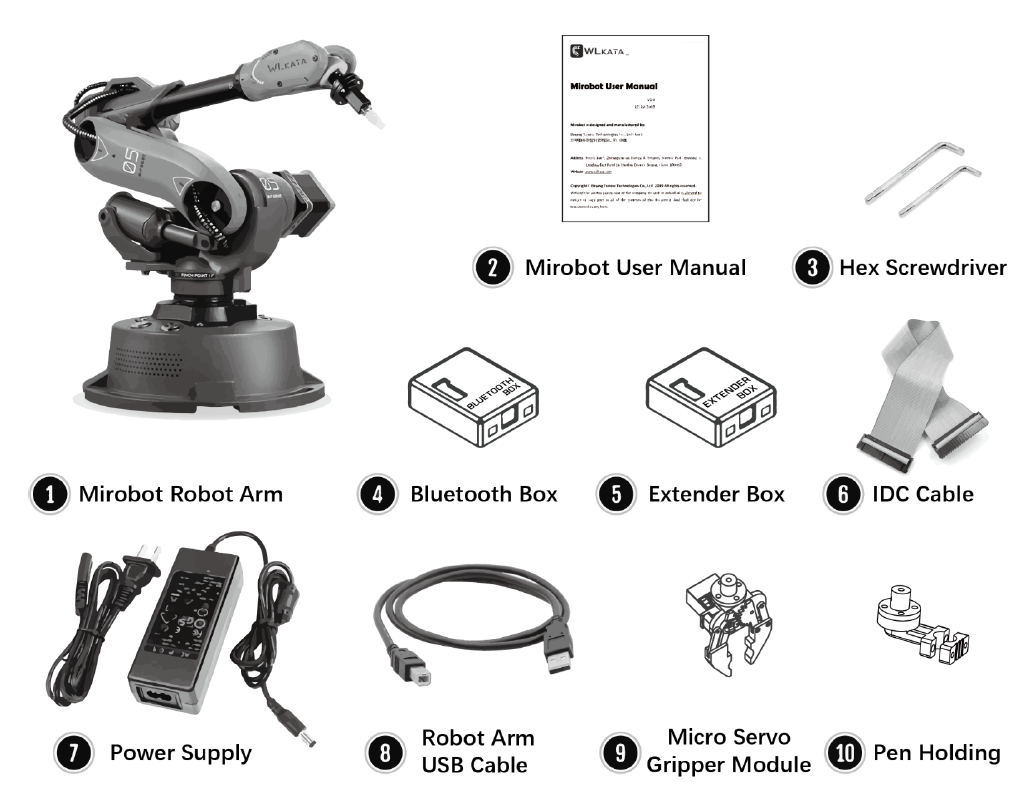
The WLKATA Mirobot standard set is ready for users who want to experience the essential functions of the Mirobot. There are 10 items in the standard set package, including the Mirobot manipulator, User Manual (paper-based simplified version), Bluetooth Box, Extender Box, IDC Cable, Gripper Module, Pen Holding, Power Supply, USB Cable and Hex Screwdrivers.
3. Add-ons and accessories
A rich range of add-ons are available for the WLKATA Mirobot. Please refers to the following table to check the name and function of the add-ons.
| number | name | image |
|---|---|---|
| 1 | Robot Controller |  |
| 2 | Robot Controller USB Cable |  |
| 3 | Low Power Pneumatic Unit |  + +  |
| 4 | Suction Cup | |
| 5 | 2-Finger Gripper |  |
| 6 | High Power Pneumatic Unit | + |
| 7 | Universal Ball Gripper | |
| 8 | GoPro (Hero7) Carrier |  |
| 9 | Sliding Rail |  + + |
| 10 | Conveyor Belt |  + + |
| 11 | Robot Arm Vehicle | 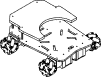 |
| 12 | Robot Arm Vehicle Power Supply and Battery |  + +  |
4. Safety precautions
This chapter introduces the safety precautions when using this device. Please read this manual carefully before using the manipulator for the first time. This device should be used in an environment that meets the below requirements. Do not modify the device without authorization. Otherwise, it may cause device failure, even personal injury, electric shock, fire, etc. The installation, operation, teaching, programming, and system development personnel of the manipulator must first read the manual carefully and use the manipulator in strict accordance with the specifications of the manual.
4.1 General Safety
DO NOT Change or Modify the Circuit or Wire
 The manipulator is an electrical equipment. Nonprofessionals are not allowed to change or modify the circuit or wire. Otherwise, it is easy to cause injury to the equipment or person.
The manipulator is an electrical equipment. Nonprofessionals are not allowed to change or modify the circuit or wire. Otherwise, it is easy to cause injury to the equipment or person.
When using the manipulator, the following safety rules shall be followed:
♦The "DANGER," "WARNING," and "NOTICE" described in the manual are only used as supplementary instructions for all safety precautions.
♦Please use the manipulator within the specified environment. If the manipulator is used beyond the specification and load conditions, the device lifetime will be shortened and even cause damages to the equipment.
♦The personnel responsible for the installation, operation and maintenance of the WLKATA Mirobot manipulator must firstly receive training, and understand various safety precautions, and master the correct operation and maintenance methods before operating and maintaining the manipulator.
♦It is not suggested to repair the faulty parts or dismantle the manipulator without professional training. If the devices fail, please contact the WLKATA Mirobot technical support engineer for advices.
♦The high corrosive cleaning is not suitable for the cleaning of the manipulator, and the anodized parts are not suitable for immersion cleaning.
♦If needs to discard the device, please correctly dispose it as industrial waste in accordance with relevant laws to protect the environment.
♦There are small parts in the packing box. DO NOT let children play with the packing or parts in the box in order to prevent swallowing or hurts.
♦If the manipulator is used by child, at least one adult must be on the side to monitor the child’s operation.
♦The equipment shall be shut down when the operation is completed.
♦In the process of manipulator movement, please do not extend your hand into the movement range of the manipulator to avoid bumping or pinching.
♦It is strictly prohibited to change or remove and modify the nameplate, description, icon, and mark of the manipulator and related equipment.
♦During the handling and installation, please pay attention to handle with care according to the instructions. Otherwise, it is easy to damage the manipulator.
♦When operating the manipulator, the local laws and regulations shall be strictly observed. The safety precautions described in the manual are only as a supplement to local safety regulations.
♦Before operating the manipulator, please refer to this WLKATA Mirobot User Manual which is downloadable in the WLKATA official website.
4.2 Precautions
I. Lifting and Handling Mirobot Correctly
 Always remember to lift and handling Mirobot by holding the Lower Arm with one hand and holding the Base with the other hand. One should not lift or handle Mirobot by holding the Upper Arm, or it would cause a damage to the motor gears of the major joints.
Always remember to lift and handling Mirobot by holding the Lower Arm with one hand and holding the Base with the other hand. One should not lift or handle Mirobot by holding the Upper Arm, or it would cause a damage to the motor gears of the major joints.

II. Be Careful of Your Finger and Preventing Pinching
When the manipulator is during operation, do not place your fingers in the gap between the upper and lower arms, or the cap between the lower arm and base to prevent pinching.

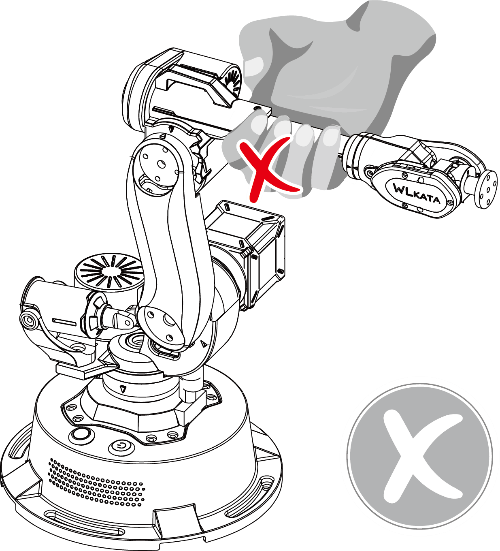
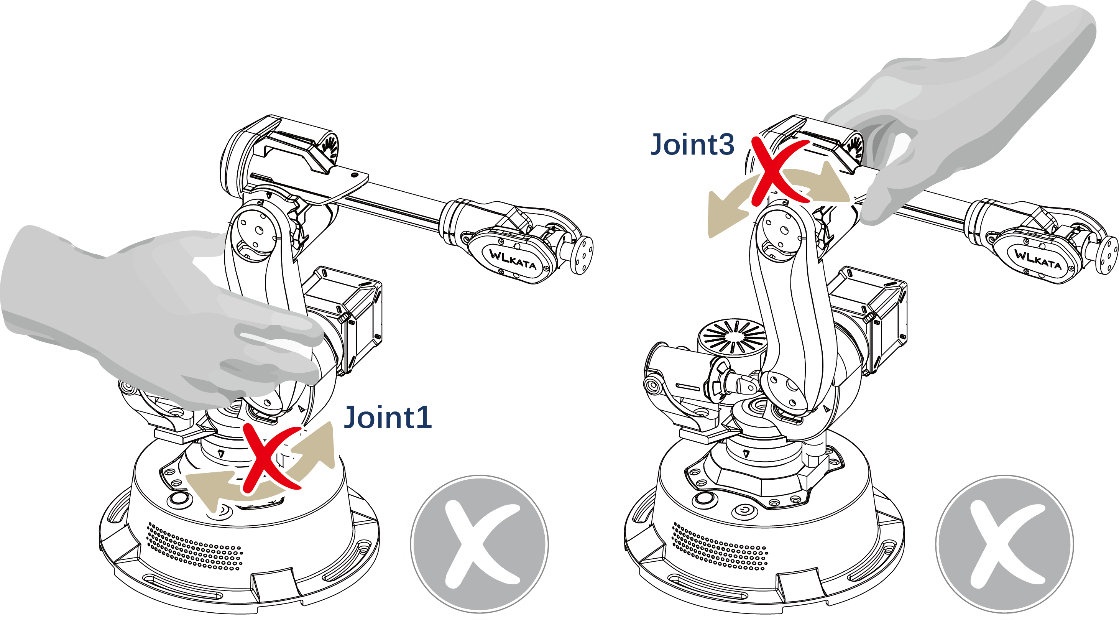
III. DO NOT Twisting the Joints by Hand!
DO NOT (!) twist the Joint 1 or Joint 3 by hand in any case, since this would lead to a fetal damage to these joints (due to the high reduction gear ratio of these motors). It is only allowed to adjust the joints by using WLKATA studio or proper operation software.
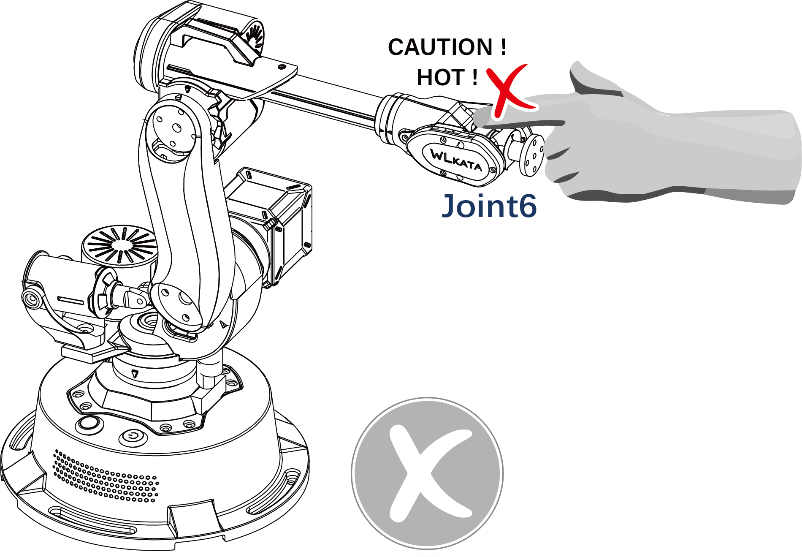
IV. Caution the Hot Surface of Motor & Chip
When Mirobot is powered on, DO NOT (!) touch the surface of joint 6 motor or the chip by hand, as those parts could be very hot during working.
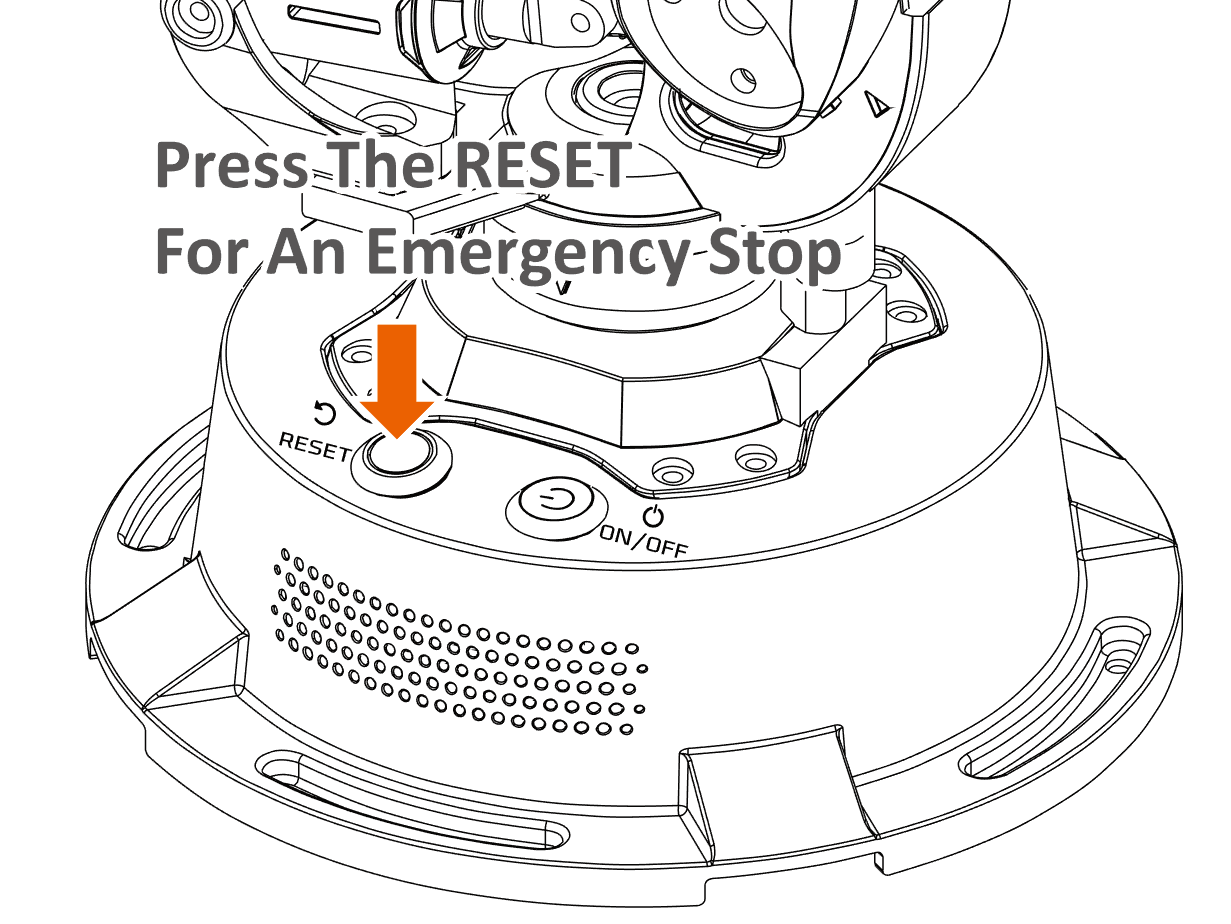
V. Press the RESET Bottom for a Hardware Emergency Stop
In any case of illegal or abnormal operation of the Mirobot, one should press the RESET button immediately on the top of the Mirobot base for an emergency stop. Then before any further operation, remember to execute the HOMING action.
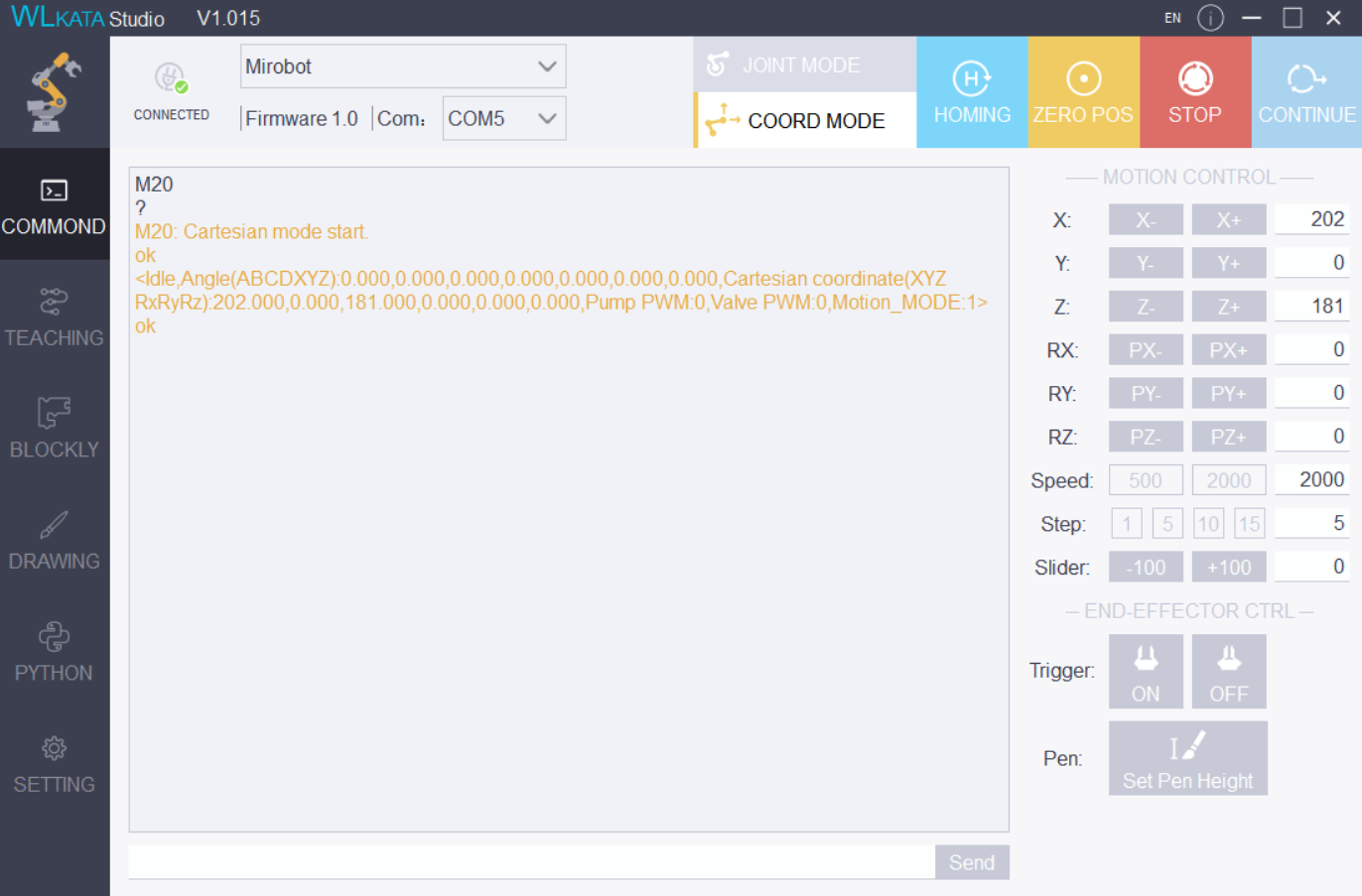
VI. Execute HOMING action on Each Time Powering on or re-connect the Mirobot manipulator
Each Time the manipulator is powered on, RESET from an emergency stop, or reopen the WLKATA studio, the user must execute the HOMING action by click the HOMING button in WLKATA Studio to homing the joints position. One should wait for the HOMING action to be completed before any further operation. (Please refer to 3.4.2 for detailed instruction).
VII. Unplugging All External Components When Powered Off
When power off the manipulator, please disconnect and unplug all external components from the manipulator, such as Bluetooth box, extender box, color sensor, sliding rail, conveyor belt etc. Otherwise the manipulator and the external components may be damaged.
VIII. Avoid Using This Device for Laser Engraving
This manipulator is not designed for executing laser engraving. For users who use this device in potentially hazardous conditions, one should wear full personnel protection equipment, including glass, glove and use proper protection cover unit, etc.